
Tianyi Zhang | 张天仪
Ph.D.
Update: I recently joined Aurora and work with Dr. Kronander and Dr. Wrenninge on team MLTA🇲🇹 (Machine Learning Training & Analysis) and team SWSS🇨🇭 (Synthetic World & Sensor Simulation).
Hi! My name is Tianyi .
I'm a Ph.D. student in Robotics at CMU advised by Prof. Matthew Johnson-Roberson.
My research lies in 3D computer vision including physics-based reconstruction, diffusion models, simulation, and 3D foundation models that enable robots to better localize, navigate, and understand their environment. I also do hardware design and prototype especially for robot perception systems.
NEWS & Media Coverage: Our work featured by NOAA.gov (2023);
The LINK (Spring 2024);
CMU News (May 2024);
CMU News (Nov 2024);
Research
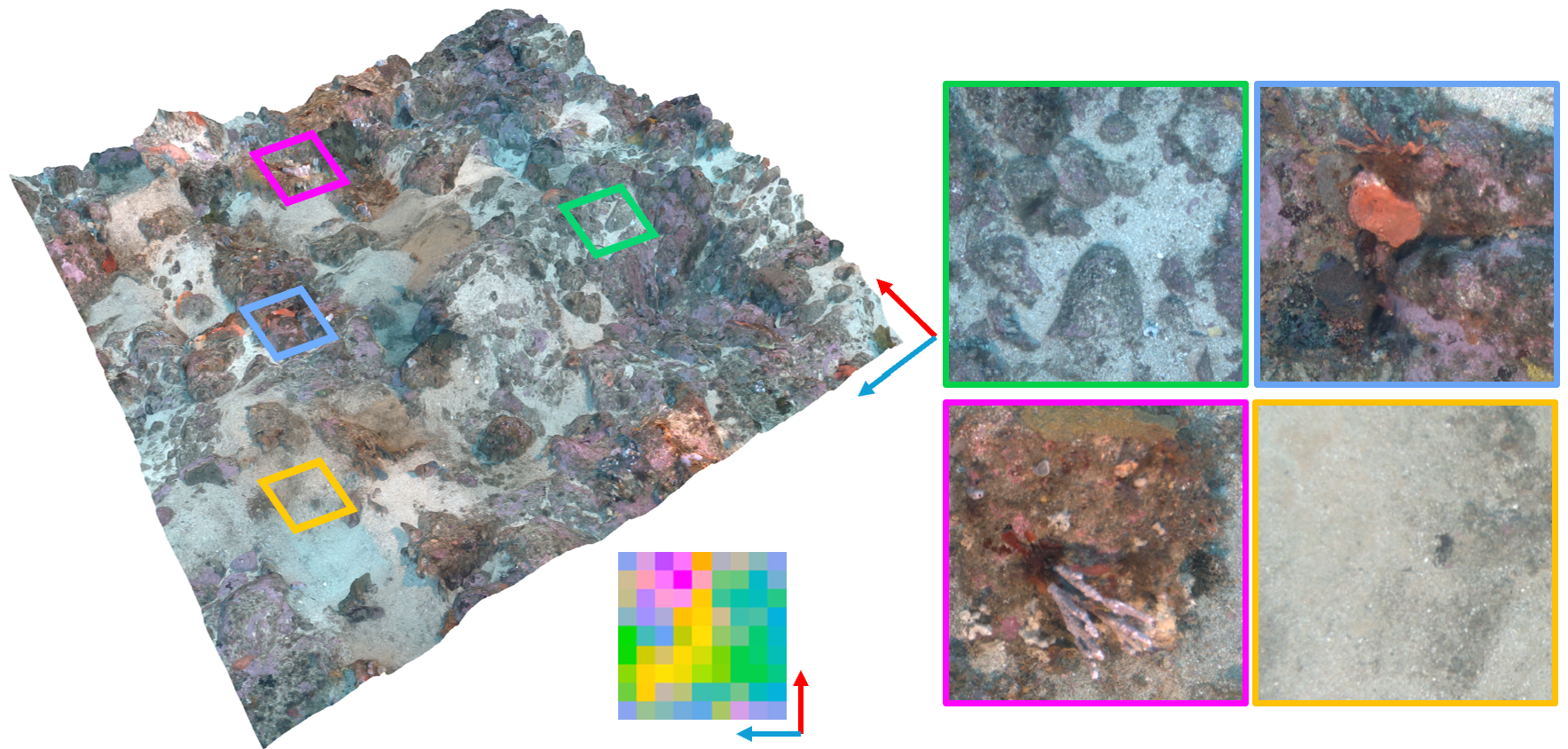
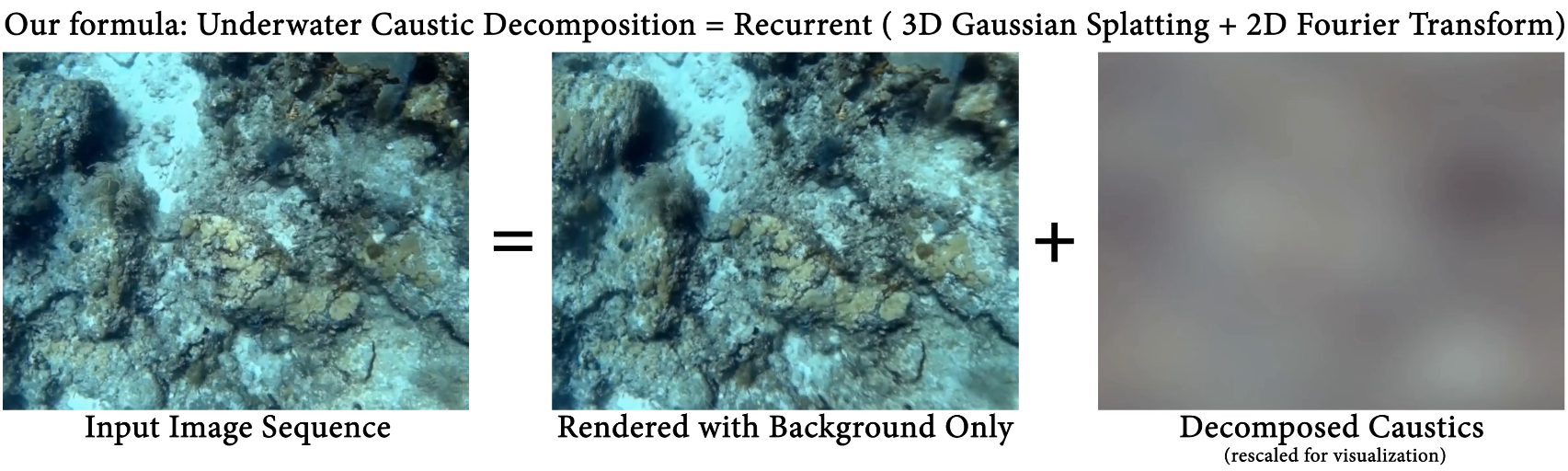
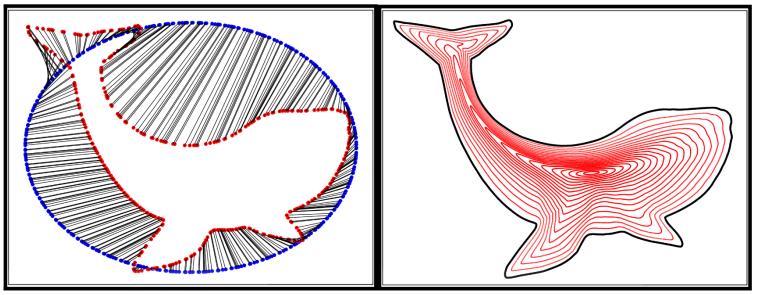
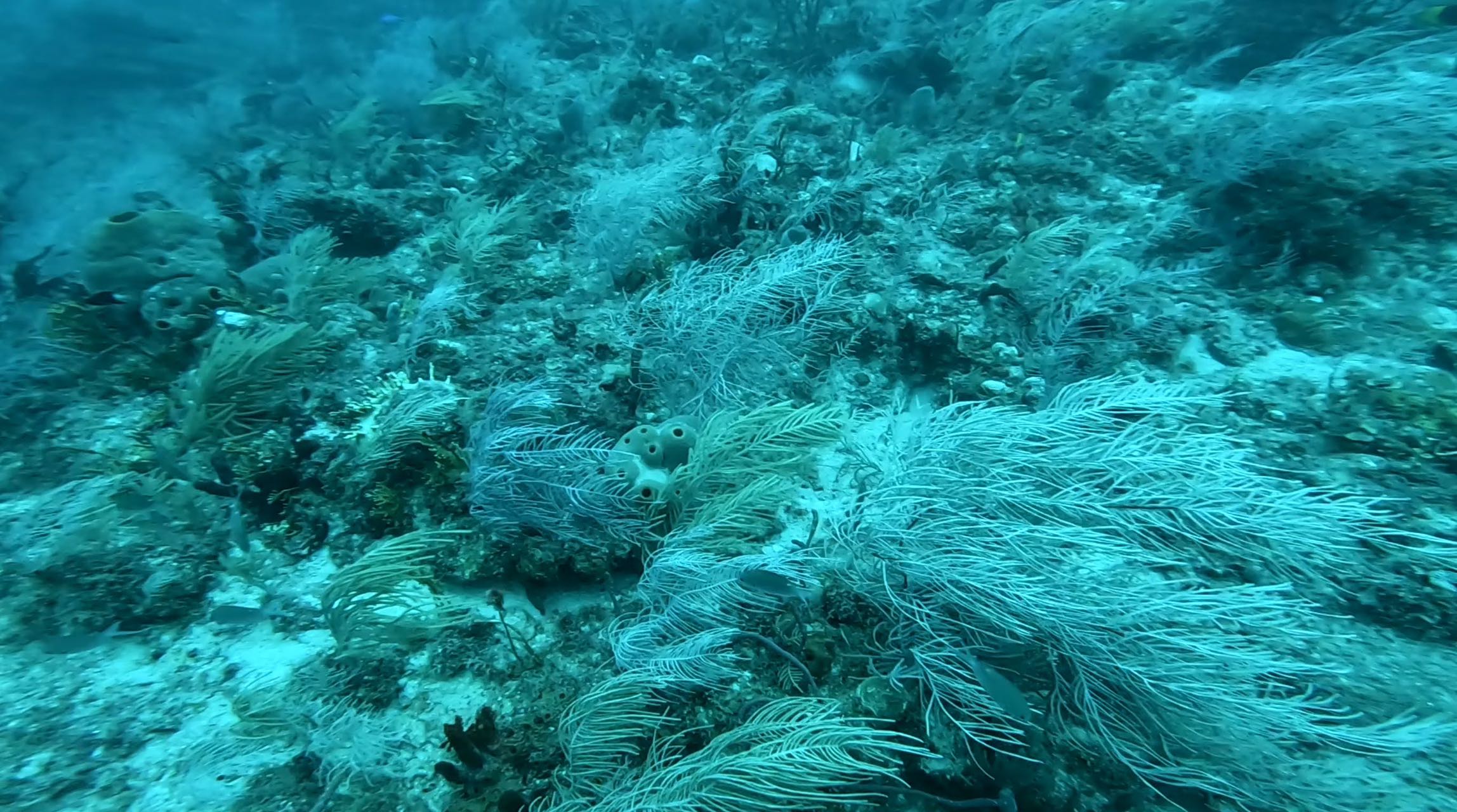
Infinite Leagues Under the Sea: Photorealistic 3D Underwater Terrain Generation by Latent Fractal Diffusion Models
FM-Wild@ICLR 2025; Full paper under review
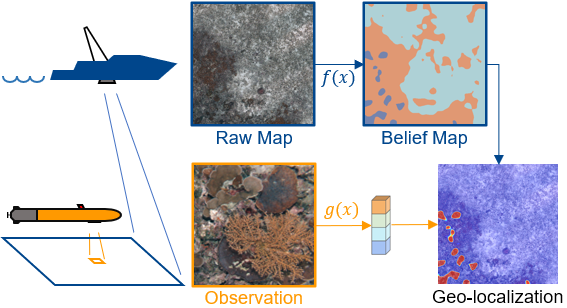
Learning Cross-Scale Visual Representations for Real-Time Image Geo-Localization
RA-L 2022, ICRA 2022
More Research & Projects
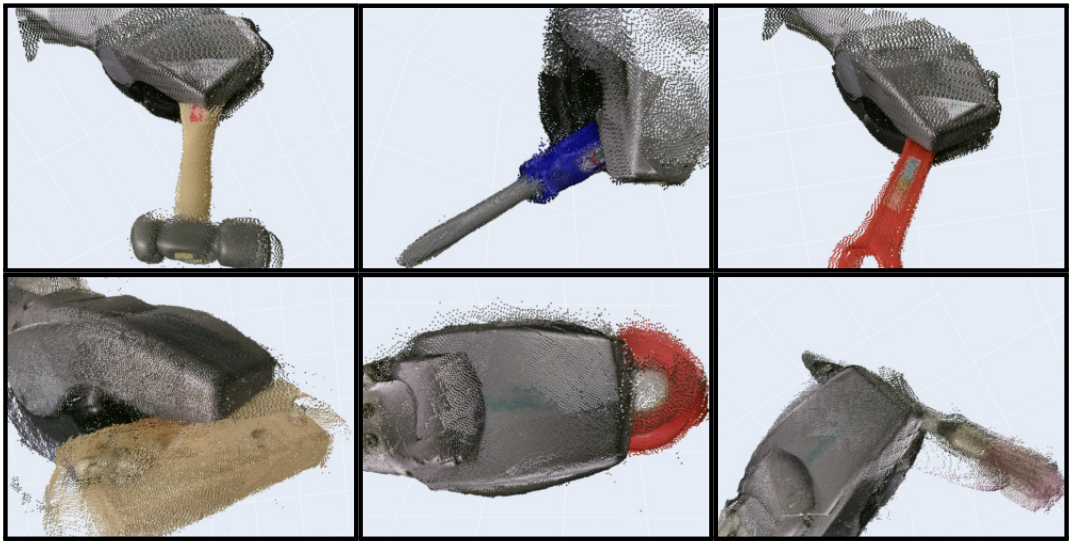
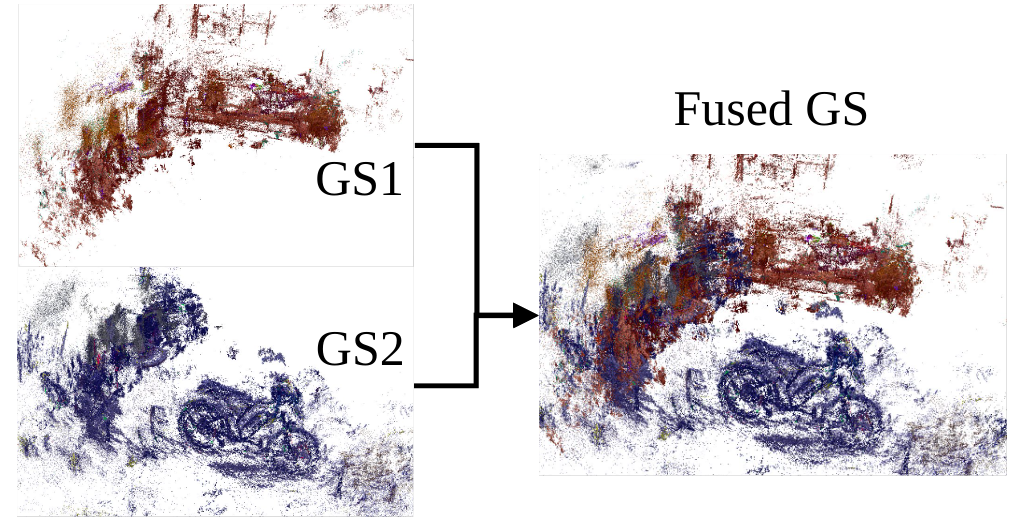
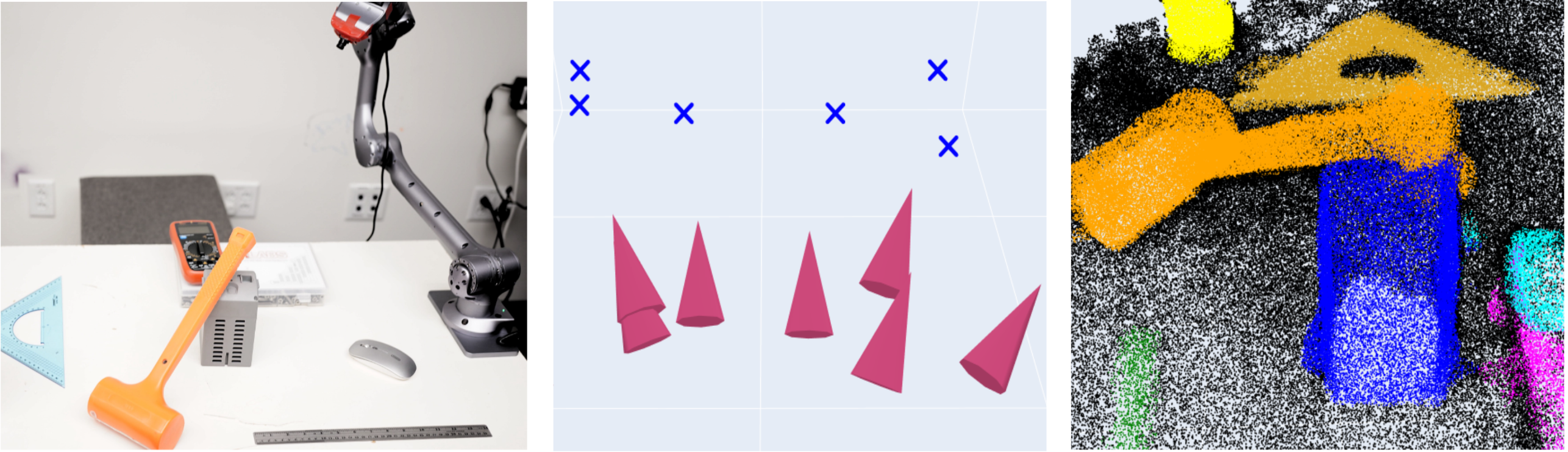
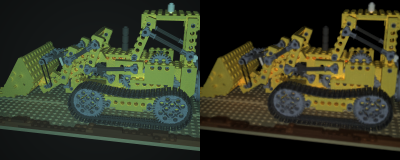
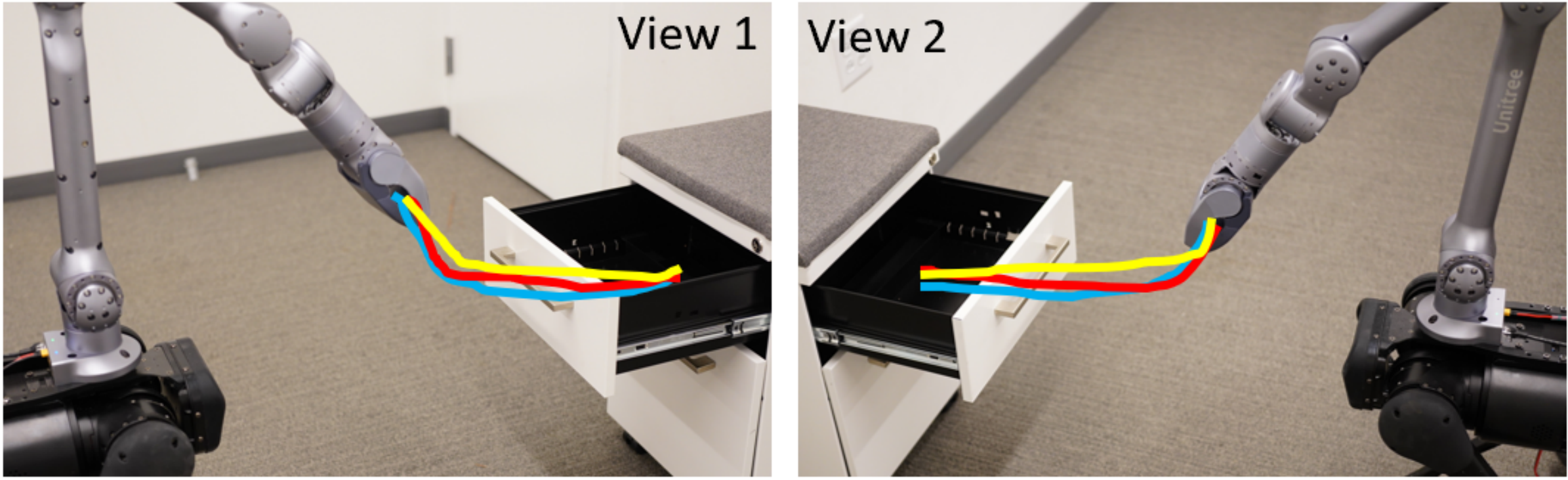
Unifying Scene Representation and Hand-Eye Calibration with 3D Foundation Models
RA-L 2024, ICRA 2025

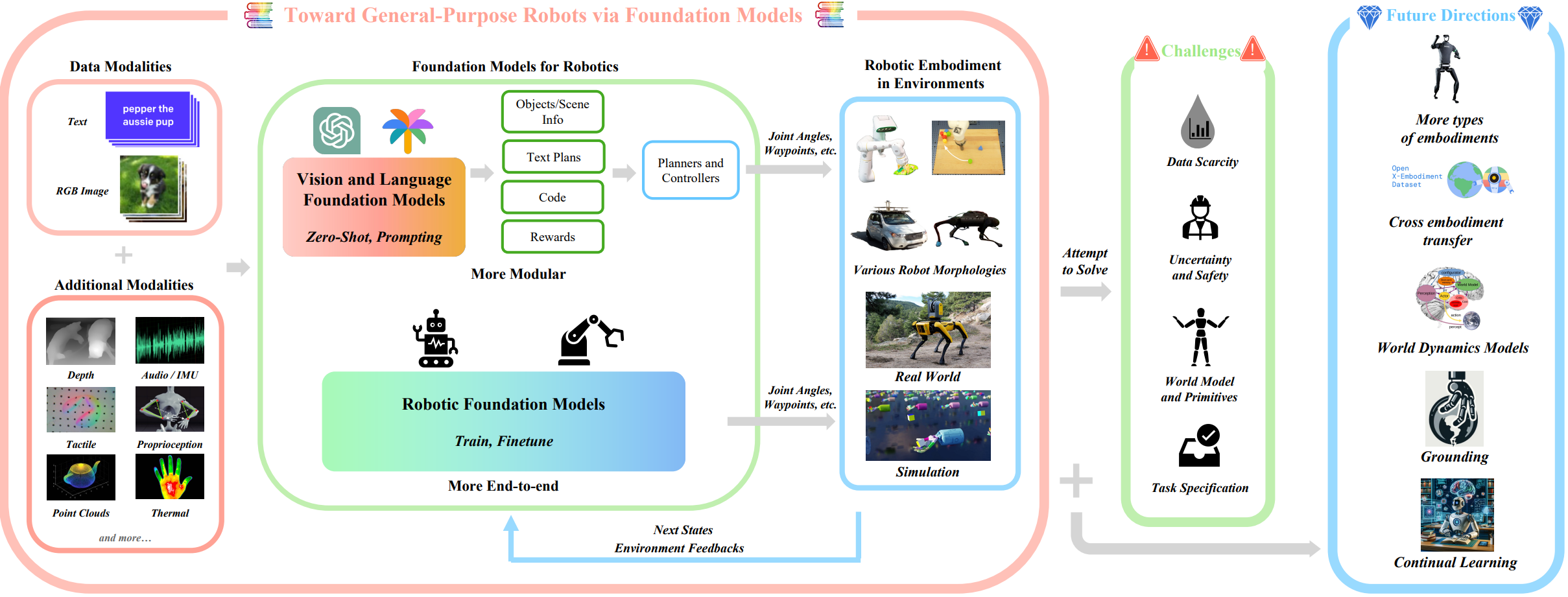
Toward General-Purpose Robots via Foundation Models: A Survey and Meta-Analysis
arxiv | in submission

Features in the Point Cloud: An Automatic Approach to High Density LiDAR to Camera Calibration
Research report for M.S. Robotics degree, University of Michigan
Field Work



Education

2022-2025

2018-2020

Work Experience

Automated Camera-LiDAR-IMU calibration for a delivery robot.

Got my first-ever funding from TJU to do my undergrad thesis at MIT working with Dr. Dixia Fan.
SLAMTEC build really good LiDARs and Robot platforms. Check it out!
Teaching
Graduate Student Instructor ROB535 Self-driving Cars: Perception and Control, Fall 2021, UMichTeaching Assistant 16664 Self-driving Cars: Perception and Control, Spring 2023, CMU
Teaching Assistant 16385 Computer Vision, Fall 2023, CMU
Services
Reviewer: RA-L 2021, 2023; ICRA 2022; KDD 2023; WACV 2024Thanks Pedro Morgado for this amazing template.