RS-ModCubes: Self-reconfigurable, Scalable, Modular Cubic Robots for Underwater Multitasking
Abstract
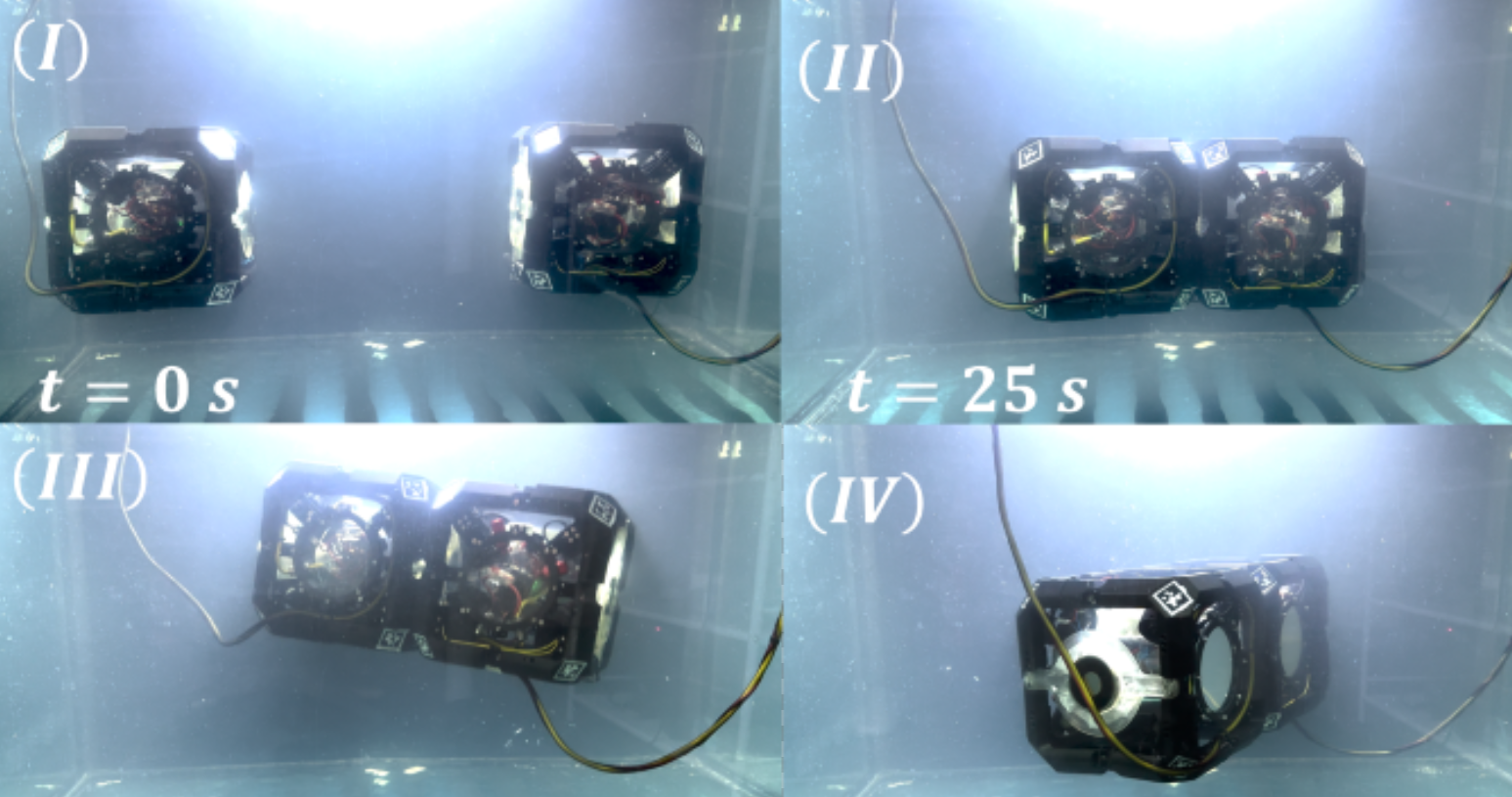
This work establishes a foundational methodology for reconfigurable underwater robotic systems, introducing the ModCube and its scalable multi-module configuration, RS- ModCubes. These platforms are designed to support a wide range of underwater applications through modularity and reconfigurability. We present a modeling framework tailored for shape-varying robotic systems, integrating hydrodynamic effects using a Monte Carlo based frontal area approximation. A model-based feedforward PD controller serves as the baseline for control. To assess performance, we draw inspiration from dexterous manipulation, evaluating the robot’s maximum task wrench space and power efficiency. Comparative analyses evaluate the platform against four commercial underwater robots. Exper- imental validation, conducted through both real-world and simulation tests, demonstrates the feasibility, scalability, and ro- bustness of the system. Key experiments include individual and multi-module trajectory tracking and hovering docking, laying the groundwork for future large-scale underwater robotic swarms.
Published at: RA-L 2025; IROS 2025